
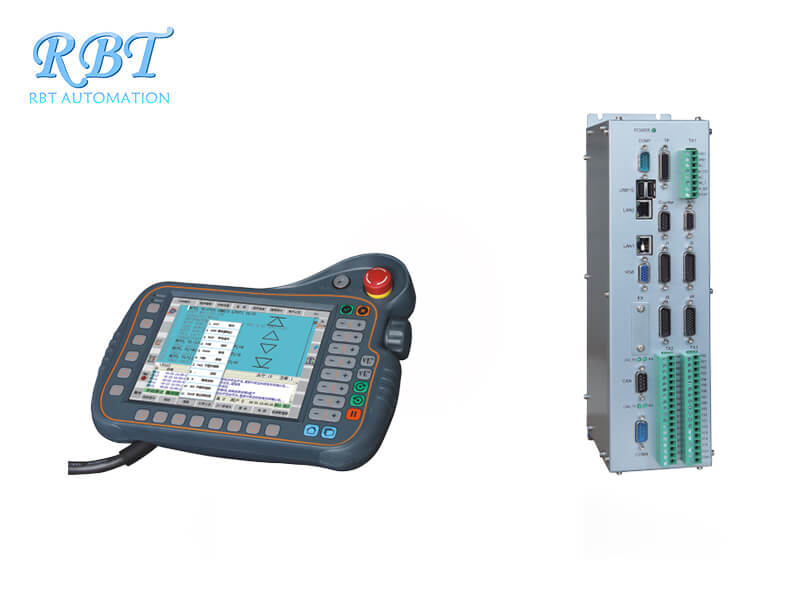
Product Introduction

RBT-S40 industrial robot control system adopts the internationally popular open software and hardware platform. Equipped with independent research and development of dedicated multi-axis motion control, data acquisition, robot dedicated terminal and security interface hardware technology; Modular software design, for different ontology structure, application industry, function, etc. Structurally, the system can control polar coordinate robot, Delta robot, SCARA robot, stacking robot and other robots. The system can be used to control robots in handling, stacking, cutting and other fields. The standard computer bus can extend the field bus, machine vision system and so on.
Model Coding
| Symbol | Series |
|---|---|
| RBT-S40 | 4-axis pulse series |
| RBT-S80 | 8-axis pulse series |
| RBT-S100 | ECAT series |
| RBT-SA40 | 4-axis series |
| RBT-SA60 | 6-axis series |
| RBT-SA80 | 8-axis series |
| RBT-SA100 | ECAT series |
Product Application
Technique Feature
· Optimized structure algorithm and adapted to ontology control of various structure forms
· Modularized functional Settings suitable for a variety of applications
· Improved computer bus connection to ensure reliability and practicality
· Open structure, synchronous international level, convenient function expansion
· Software PLC function, convenient logic control
· Process function, simple programming and easy operation
· EtherCAT servo adaptation
· Safety module to ensure safe production of robots
Technical parameters
| Teach pendant | 8 inches TFT-LED, keyboard + touch screen, mode selection switch, safety switch, emergency stop button |
|---|---|
| Control shaft number | 4 axis |
| Storage Spaces | 200M |
| Safety module | Emergency stop, abnormal signal to ensure the robot to stop quickly |
| Control servo | Absolute incremental, domestic, Panasonic, Fuji, Tama Chuan, Delta, Yaskawa, Mitsubishi, Yamagata |
| Interface | Digital I/O interface, 16 input/16 output, Ether CAT Control servo |
| 4-way 0-10V analog output, 12-bit accuracy | |
| 2-channel encoder signal interface (position tracking) | |
| Dual Ethernet interface,(RS232,485,422)interface | |
| Operation mode | Teach, reproduce, remote |
| Program method | Teaching reproduction, process programming(Gluing, tracking, vision, remote, stamping) |
| Control method | Position control |
| Coordinate Systems | Joint coordinates, base coordinates, user coordinates, tool coordinates |
| Software PLC | Trapezoidal map editing,5000 step |
| Applications | Welding, cutting, handling, palletizing, machine tool loading and unloading, spraying, forging and pressing, casting and other fields or industries |
| Power | AC220V±15% 50/60Hz 160W |
| Size | 330*180*88mm |
Installation dimension drawing

Certificate

Contact Information
NO.219 NanyangRoad, Zhengzhou City, Henan Province China




