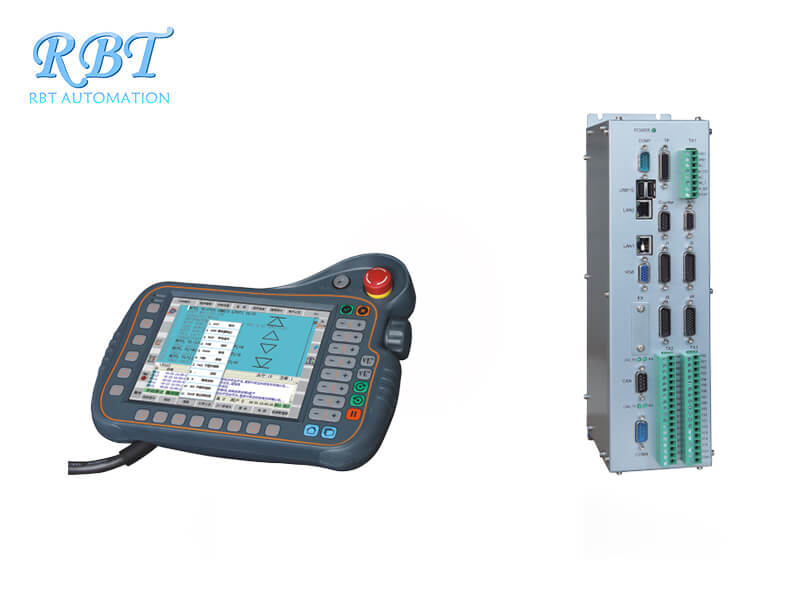
Product Introduction

RBT-S100 industrial robot control system adopts international standard EtherCAT bus technology.Equipped with data acquisition card, robot special terminal and security interface;Modular software design, for different ontology structure, application industry, function, etc.It can realize the control of vertical multi-joint tandem robot, vertical multi-joint parallelogram robot, vertical multi-joint L-shaped wrist robot, vertical multi-joint spherical wrist robot, polar coordinate robot, multi-axis special machine and other robots.Used in handling, welding, spraying, stacking, cutting, polishing and polishing fields.Industrial bus can extend fieldbus, machine vision system and so on.
Model Coding
| Symbol | Series |
|---|---|
| RBT-S40 | 4-axis pulse series |
| RBT-S80 | 8-axis pulse series |
| RBT-S100 | ECAT series |
| RBT-SA40 | 4-axis series |
| RBT-SA60 | 6-axis series |
| RBT-SA80 | 8-axis series |
| RBT-SA100 | ECAT series |
Product Application
Technique Feature
· Optimized structure algorithm and adapted to ontology control of various structure forms
· Modularized functional Settings suitable for a variety of applications
· 24 axis control, can realize three machine coordination and external axis interface
· Ether CAT International Standard Bus, 100M speed, U-level synchronization accuracy
· Built-in position control mode, speed control mode, interpolation cycle 0.5-2ms
· System integration: 24 in and 24 out I/O, 4-way D/A, encoder interface
· Software PLC function, convenient logic control
· Process function, simple programming and easy operation
· Ether CAT servo adaptation
· Safety module to ensure safe production of robots
Technical parameters
| Teach pendant | 8 inches TFT-LED, keyboard + touch screen, mode selection switch, safety switch, emergency stop button |
|---|---|
| Control shaft number | 24 axis |
| Storage Spaces | 200M |
| Safety module | Emergency stop, abnormal signal to ensure the robot to stop quickly |
| Control servo | Ether CAT bus servo |
| Interface | Digital I/O interface, 24 input/24 output, Ether CAT Control servo |
| 4-way 0-10V analog output, 12-bit accuracy | |
| 2-channel encoder signal interface (position tracking) | |
| Dual Ethernet interface, Ether CAT interface | |
| Operation mode | Teach, reproduce, remote |
| Program method | Teaching reproduction, process programming(Gluing, tracking, vision, remote, stamping) |
| Control method | Position control |
| Coordinate Systems | Joint coordinates, base coordinates, user coordinates, tool coordinates |
| Software PLC | Trapezoidal map editing,5000 step |
| Applications | Welding, cutting, handling, palletizing, machine tool loading and unloading, spraying, forging and pressing, casting and other fields or industries |
| Power | DC24V 5A |
| Size | 244*141*70mm |
Installation dimension drawing

Certificate

Contact Information
NO.219 NanyangRoad, Zhengzhou City, Henan Province China