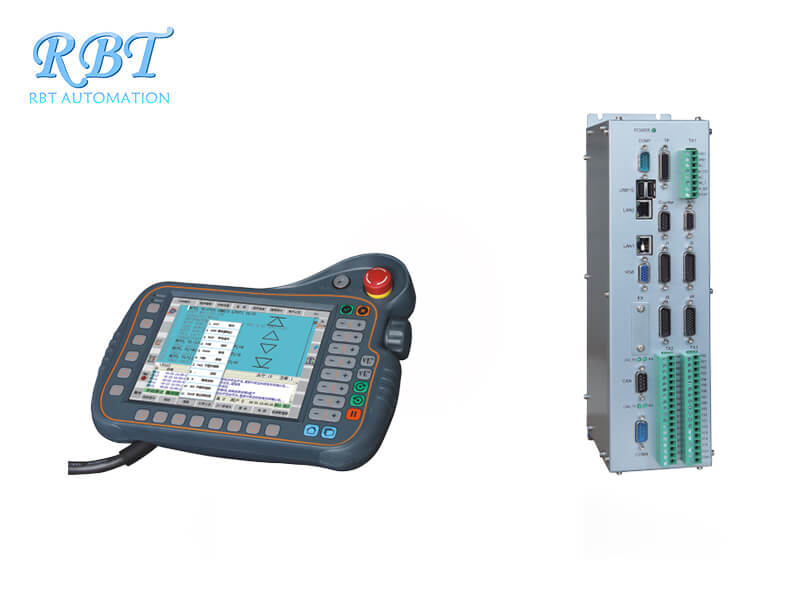
Product Introduction

RBT-cd40-hca7 /CRP-CD60-HCA7 drive and control integrated movement adopts ARM platform different from the company’s existing controller series, and adopts a brand new technology and structure form.The actuator and controller are highly integrated, modular connection, easy to assemble and disassemble, and the power modules are combined at will, with strong expansibility and high flexibility.Parallel bus connection is adopted between the controller and the module for real-time communication, which is more stable and reliable.More times innovation, adapt to the future industrial robot development needs.
Model Coding
| Symbol | Series |
|---|---|
| RBT-E40 | 4-axis robot control cabinet |
| RBT-E60 | 6-axis robot control cabinet |
| RBT-E80 | 8-axis robot control cabinet |
Product Application
Technique Feature
· The controller, driver and power supply are all independently modularized and can be combined with higher flexibility and convenient disassembly and combination
· The controller is connected to the teaching device through communication mode, which can be hot-plugged and plugged at any time. The teaching device can be used in one machine
· System integration: 24-in-16-out I/O, 4-way D/A, 2-way encoder interface and 1-way CAN interface
· Complete electrical installation, saving the installation time of customers’ electric cabinets
· Integrated LIQUID crystal display, clear driving state information of controller
· Integrated process package to reduce customer development input and simplify programming operation
· High integration, small size and beautiful appearance
· Brand new ARM platform, low power consumption and low heating
· 6-axis parallel bus communication control
· Automatic address allocation for drivers
· Software PLC function, convenient logic control
Technical parameters
| Power Supply | Three-phaseAV220V±15% 50/60Hz,1.5kw(3kg)3KW(6kg) |
|---|---|
| Control shaft number | 4/6 axis |
| Storage Spaces | 1GB |
| Adapt the robot type | 3kg-6kg robot body |
| Adaptation motor | Hechuan motor |
| Interface | Digital I/O interface, 24 input/16 output |
| 4-way 0-10V analog output, 12-bit accuracy | |
| 2-channel encoder signal interface (position tracking) | |
| Special terminal interface for robot, hard limit, anti-collision, maintenance switch, alarm brake control | |
| Ethernet, RS485, CAN | |
| Operation mode | Teach, reproduce, remote |
| Program method | Teaching reproduction, process programming(Gluing, tracking, vision, remote, stamping) |
| Control method | Position control |
| Coordinate Systems | Joint coordinates, base coordinates, user coordinates, tool coordinates |
| Software PLC | Trapezoidal map editing,5000 step |
| Applications | Tracking, vision, stamping, gluing, etc |
| Size | 500*305*700mm |
Installation dimension drawing

Certificate

Contact Information
NO.219 NanyangRoad, Zhengzhou City, Henan Province China